

. Driverless car. Self driving vehicle. UGV.")
Prosegue la crescita di VisLab, centro di eccellenza per la progettazione e realizzazione di sistemi di guida autonoma per veicoli, grazie ai nuovi orizzonti di ricerca e al nuovo spazio nel Campus Scienze e Tecnologie dell’Università di Parma
Cosa c’è sotto la carrozzeria di un veicolo a guida autonoma? L’elenco può essere piuttosto lungo, se pensiamo alle tecnologie che lo caratterizzano: apprendimento automatico, reti neurali profonde, visione stereo, robotica, fusione di sensori, pianificazione, calibrazione del sistema e molto altro ancora. Di tutti questi aspetti, in qualità di realtà high-tech, si occupa VisLab (abbreviazione di Vision and Intelligent Systems Laboratory), dai fondamenti della percezione ambientale fino al prodotto e all'implementazione. Fondata alla fine degli anni '90 come laboratorio di ricerca dell'Università di Parma, la società si è rapidamente affermata come pioniere dell'autonomia dei veicoli.
VisLab negli anni ha costantemente continuato la sua ricerca avanzata sotto la guida del fondatore Alberto Broggi, stabilendo diverse pietre miliari della guida autonoma riconosciute a livello internazionale. Acquisita nel 2015 dall’americana Ambarella, nome di punta a livello internazionale nello sviluppo di semiconduttori per la compressione video e l'elaborazione delle immagini, nel 2019 VisLab è diventata anche la prima società autorizzata dal Ministero dei Trasporti a testare veicoli driverless su strada.
Forte di un numero di ricercatori e di veicoli autonomi in continua crescita, da pochi mesi VisLab ha annunciato che raddoppierà lo spazio a propria disposizione nel Campus Scienze e Tecnologie dell’Università di Parma, sulla base di un progetto esecutivo che prevede ulteriori 1000 metri quadri di superficie disposti su tre livelli, per la realizzazione di spazi ufficio, nuovi laboratori e un’ampia zona garage. Per questo motivo abbiamo deciso di contattare Alberto Broggi per capire quale sarà il prossimo futuro tecnologico della guida autonoma, grazie al rinnovato e rilanciato impegno di VisLab nel settore.

Cosa sta facendo oggi il team di ricerca e sviluppo VisLab Automotive di Ambarella per quanto riguarda la guida autonoma?
Molto prima di essere acquisito da Ambarella nel 2015, VisLab è stato un pioniere della guida autonoma con sede a Parma. Quest'anno celebreremo il 25° anniversario del primo esperimento di guida semi-autonoma di un'auto su una strada normale, aperta al traffico, con equipaggiamento standard. Era il giugno del 1998 quando una Lancia Thema equipaggiata con un pc e una coppia di videocamere partì da Parma per un viaggio di una settimana in giro per l'Italia per testare e mostrare i risultati di anni di ricerca. L'auto ha percorso circa 2000 km e per il 94% del tragitto il pc di bordo ha guidato l'auto, mentre la velocità è stata impostata dal conducente.
Questo esperimento è stato il primo di questo tipo e VisLab ha ottenuto una visibilità globale. Abbiamo anche partecipato alle sfide Darpa: nel 2005 il veicolo di VisLab (TerraMax) ha raggiunto il traguardo dopo 132 miglia completamente autonome, attraversando il deserto del Mojave tra la California e il Nevada.
Sono seguite altre sfide: nel 2010 VisLab ha equipaggiato quattro veicoli elettrici con la sua tecnologia e ha guidato da Parma a Shanghai in modalità autonoma. Questo viaggio ha comportato più di 13mila km in ambienti sconosciuti, con diverse condizioni meteorologiche e di traffico.
Nel 2013, VisLab ha equipaggiato il nostro veicolo BRAiVE e ha guidato nel centro di Parma. Abbiamo segnato un'altra prima mondiale: una parte di quel percorso è stata percorsa senza nessuno al posto di guida.
Nel 2015 VisLab è stato acquisito da Ambarella, un'azienda di semiconduttori per l'intelligenza artificiale con sede nella Silicon Valley, diventando un'organizzazione di ricerca e sviluppo di Ambarella per le applicazioni automobilistiche e continuando a concentrarsi sulla guida autonoma (AD). Questa integrazione ha avuto un grande successo, poiché l'obiettivo di Ambarella era quello di acquisire la lunga esperienza di VisLab nel campo dell'AD, mentre l'obiettivo di VisLab era quello di collaborare con una forte azienda di silicio in grado di fornire chip per l'AD.
Dal 2015 in poi, Ambarella, insieme al nostro team di ricerca e sviluppo di Parma, ha preparato le demo della sua tecnologia da mostrare al Ces di Las Vegas. Ogni anno sono stati mostrati i continui progressi dell'azienda nel campo dell'AD. Ad esempio, al Ces2022 Ambarella ha portato i clienti a fare dei test drive con i suoi veicoli di ricerca e sviluppo, che erano in grado di guidare autonomamente per le strade di Las Vegas (automazione L4). Questi veicoli erano dotati di chip Ambarella per l'elaborazione edge delle immagini (il che significa che i chip erano installati nelle telecamere) e di un pc nel bagagliaio per l'elaborazione di alto livello e il controllo del veicolo.
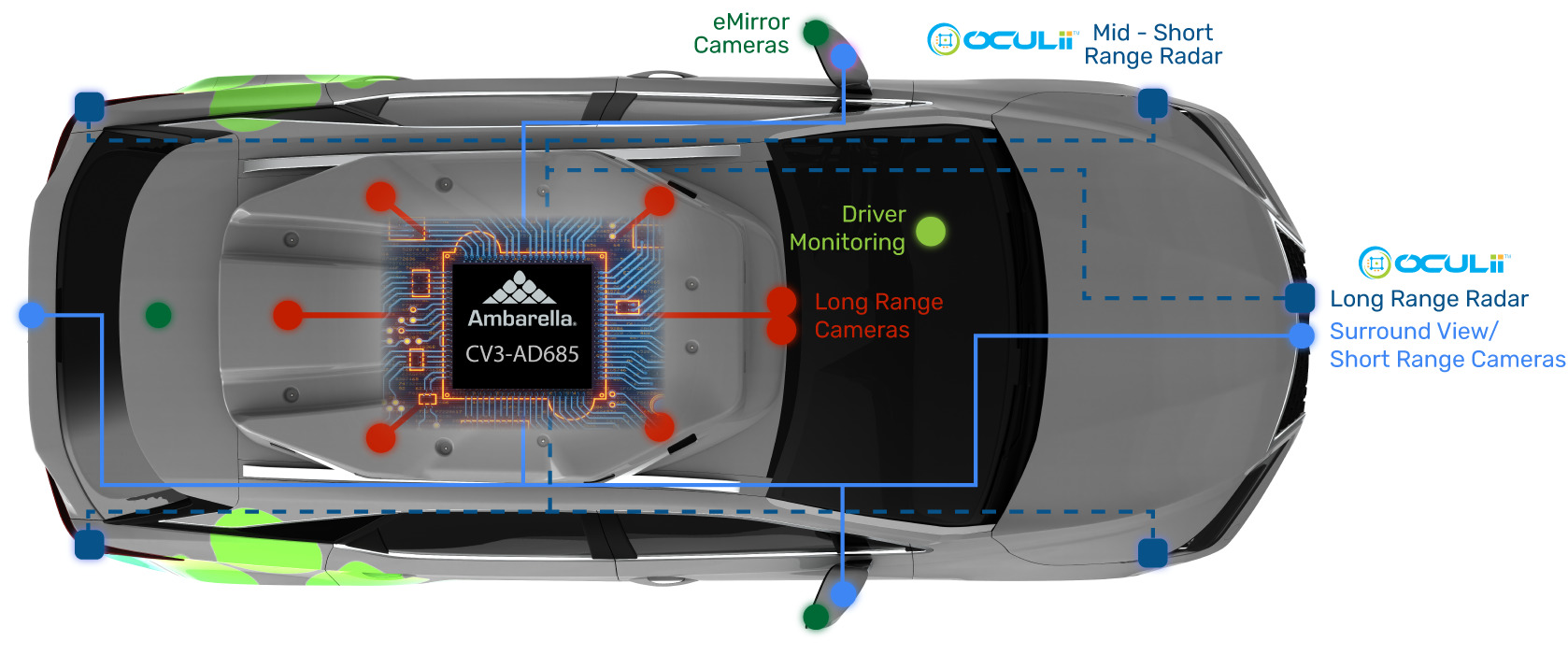
Al Ces2023, Ambarella ha effettuato dei test drive con il suo ultimo veicolo di ricerca e sviluppo senza pc a bordo. Solo un anno dopo, tutta l'elaborazione, sia la percezione che la fusione dei sensori, veniva eseguita su un singolo chip, il CV3-AD, appena presentato alla fiera. E l'innovazione continua.
Quali sono le principali strategie seguite da VisLab nel settore della guida autonoma?
Dal punto di vista hardware, la nostra strategia consiste nel dimostrare che i veicoli possono raggiungere livelli di autonomia L4 utilizzando un singolo chip di elaborazione con un budget di potenza molto limitato. A differenza di altre soluzioni, che si basano su un'elaborazione generica e di solito impiegano un raffreddamento a liquido per la dissipazione del calore, il chip CV3-AD di Ambarella fornisce una potenza di calcolo sufficiente per far funzionare i veicoli L4, con un consumo energetico minimo e senza bisogno di un raffreddamento speciale.
Dal punto di vista del software, inizialmente le prime iterazioni dello stack AD di Ambarella facevano un uso massiccio di mappe HD, cioè mappe molto precise di segnaletica stradale, cordoli, pali, ecc. Tuttavia, sarebbe stato difficile scalare questa soluzione perché le mappe HD devono coprire tutto il mondo e devono essere costantemente aggiornate. Di conseguenza, stiamo passando a una soluzione che utilizza solo mappe topologiche, che sono ampiamente disponibili e non richiedono aggiornamenti frequenti.
Dal punto di vista dei sensori, Ambarella ha selezionato le modalità di rilevamento della telecamera e del radar per percepire l'ambiente del veicolo. Le telecamere, soprattutto quelle ad alta risoluzione e ad alta gamma dinamica, forniscono una rappresentazione estremamente dettagliata e ricca del mondo. In combinazione con le odierne tecniche basate sul deep-learning, queste telecamere ci permettono di estrarre informazioni rilevanti con una precisione e un dettaglio senza precedenti, rendendo possibile e conveniente la classificazione degli oggetti. Inoltre, Ambarella utilizza la visione stereo per la percezione frontale; in particolare, due telecamere puntate nella stessa direzione catturano in tempo reale le caratteristiche ambientali da due punti di vista leggermente diversi. L'utilizzo di telecamere stereo consente di stimare le distanze in modo estremamente preciso e denso.
La tecnologia radar Oculii AI di Ambarella fornisce una soluzione di rilevamento complementare, dettagliata e robusta anche in caso di maltempo, che la rende la tecnologia perfetta da affiancare alla computer vision basata su telecamere. Sebbene lo stack AD di Ambarella non sia dotato di Lidar, i nostri chip - e la famiglia CV3-AD in particolare - sono stati progettati per consentire ai clienti di collegarvi sorgenti Lidar e di eseguire anche l'elaborazione di nuvole di punti basate sul lidar (oltre alle nuvole di punti basate sul radar).
Qual è il ruolo dell'intelligenza artificiale nello sviluppo di VisLab?
L'intelligenza artificiale ha rivoluzionato il modo in cui viene concepito il nostro stack di AD. Prima che il deep learning diventasse di uso comune, i blocchi principali dello stack di VisLab - come la percezione, il processo decisionale e la pianificazione - erano implementati tramite soluzioni algoritmiche tradizionali. La situazione è cambiata circa sette-otto anni fa, quando Ambarella ha iniziato a realizzare il suo primo chip di computer vision (il CV1) con funzionalità di rete neurale. Da allora, sono state create, testate e migliorate tre generazioni dei nostri chip CVflow AI, estendendo le capacità neurali e rendendo quindi possibile non solo l'implementazione dell'elaborazione della percezione (cioè l'elaborazione di pixel e nuvole di punti radar) con le reti neurali, ma anche l'aggiunta dell'elaborazione neurale ai livelli superiori dello stack (ad esempio, la previsione o la pianificazione del movimento). L'elaborazione dell'intelligenza artificiale basata sul deep-learning ha definito una pietra miliare storica in questo e in molti altri campi, cambiando il paradigma di sviluppo dalla pura codifica degli algoritmi alla definizione di reti alimentate da enormi serie di dati per il loro addestramento.

Qual è oggi la sfida tecnica più grande per VisLab?
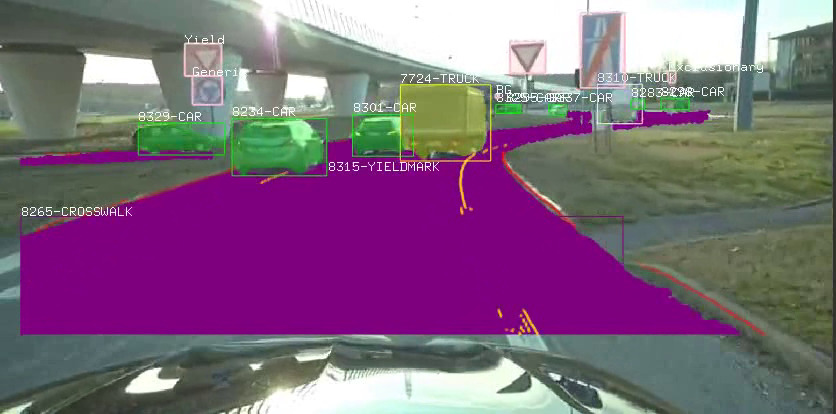
Negli ultimi 25 anni il VisLab ha lavorato su tutti gli aspetti della percezione, come il rilevamento di veicoli, pedoni e biciclette, la stima delle curvature e degli angoli di inclinazione delle strade, la determinazione dello stato dei semafori e molte altre caratteristiche fisiche dell'ambiente stradale. Le soluzioni sono state trovate elaborando i dati provenienti dai sensori del veicolo (principalmente telecamere e radar) e, infine, fondendo le informazioni provenienti da più sensori per rendere i dati più affidabili. In effetti, la stima delle caratteristiche fisiche richiede sensori fisici; in questo caso VisLab utilizza tecnologie di visione e di rilevamento radar. Tuttavia, c'è un altro tipo di percezione che è di grande importanza quando si guida un veicolo, e che gli esseri umani usano in modo molto intuitivo: la percezione comportamentale...
Per molti anni, il nostro team di VisLab ha considerato una sfida prevedere il comportamento degli altri utenti della strada. Questo perché sono necessari molti indizi e suggerimenti naturali, non solo misurazioni fisiche, per dare forma a previsioni estremamente accurate di ciò che faranno altri veicoli, pedoni o altri oggetti in movimento. Ad aumentare la complessità del problema, il fatto che i partecipanti non sono soli sulla strada, ma tutti influenzano il comportamento degli altri.
Una soluzione basata su un algoritmo deterministico o su regole predefinite avrebbe un successo limitato, poiché la vera salsa magica che rende il problema risolvibile risiede nella disponibilità di insiemi di dati estremamente ampi provenienti da situazioni reali, che rappresentano casi reali e non solo simulazioni. Il VisLab sta ora studiando tecniche basate sul deep learning che ci permetteranno di fare previsioni significative sui movimenti futuri degli altri soggetti presenti sulla strada, in modo da scegliere la manovra migliore che renderà la nostra guida automatizzata il più fluida ed efficiente possibile.
State testando i vostri veicoli in uno scenario reale?
Il centro di ricerca e sviluppo VisLab di Ambarella, con sede a Parma, è la prima azienda in Italia ad aver ottenuto l'autorizzazione del Ministero per eseguire test di guida autonoma su strade pubbliche. VisLab sta conducendo test quotidiani su strade rurali e urbane, principalmente nelle vicinanze della sua struttura, con una flotta di veicoli autonomi. I nostri test prevedono la guida in centro città insieme ad altri partecipanti al traffico (pedoni, biciclette, veicoli, autobus, ecc.), gestendo tutti gli scenari di traffico più comuni, come rotatorie, incroci, confluenze e uscite da strade ad alta velocità, semafori e attraversamenti pedonali.
Durante i nostri test, ogni veicolo è supervisionato da un operatore in grado di riprendere il controllo dell'auto in caso di necessità. Ogni supervisore viene addestrato per un gran numero di scenari possibili e per un periodo di tempo sufficientemente lungo, in modo da familiarizzare con il modo in cui effettuare gli interventi nel modo più rapido e sicuro possibile. Infatti, ogni supervisore, prima di operare sui nostri veicoli, ottiene una specifica certificazione e autorizzazione dal Ministero dei Trasporti italiano. Diversi membri del nostro team sottostante hanno ottenuto questa autorizzazione per supervisionare il funzionamento dei nostri veicoli di R&S.




{kind=link}