


I motori DC piccoli e potenti sono un prerequisito essenziale per lo sviluppo di sistemi sempre più integrati. Questi motori fungono da volano tecnologico in svariati settori: dalla tecnologia medica e di laboratorio all’ambito aerospaziale, alla robotica, ai sistemi ottici e alla fotonica nonché ai macchinari e alle apparecchiature industriali in generale.
Tuttavia, questi piccoli motori diventano dei sistemi di azionamento o posizionamento orientati all'applicazione solo in combinazione con altri componenti, come riduttori, encoder e controlli di posizione. La scelta del “partner” giusto è fondamentale per un funzionamento affidabile. Tutti i componenti devono essere idonei per il rispettivo motore e soddisfare i suoi requisiti. Nel peggiore dei casi, la scelta del controllore sbagliato può distruggere il motore in un attimo.
Quando si deve scegliere un controllo di posizione per un sistema di azionamento è importante rispondere prima ad alcune domande. Ad esempio, occorre definire quali siano i movimenti da eseguire e le relative implicazioni in termini di requisiti per il controllo del motore. L’azionamento lavora in continuo o in modalità start/stop? È richiesta precisione di posizionamento? Che tipo di carico deve muovere l’azionamento? Quali sono i cicli di carico? È necessario un riduttore? Qual è il motore più adatto a questa applicazione? Solamente in seguito alle risposte a queste domande si può procedere alla selezione del controllo di posizione E le cose si fanno interessanti perché non tutti i controlli di posizione vanno bene per tutti i motori. Per di più, i micromotori DC a spazzole hanno requisiti particolari per via del loro design.

Rischio di surriscaldamento
Il cuore dei motori DC in miniatura e micro di FAULHABER è costituito dalla bobina rotore coreless autoportante, protetta da brevetto, con design ad avvolgimento inclinato e commutazione delle spazzole, che ruota intorno a un magnete fisso. Per via della sua estetica spesso questa tipologia viene chiamata motore ad armatura a campana. Il suo design offre numerosi vantaggi pratici ma condiziona anche la scelta del controllo di posizione.
L’intercapedine d’aria simmetrica non permette la formazione del cogging e questo consente un posizionamento preciso e un eccellente controllo della velocità. Il rapporto tra carico e velocità, tra corrente e coppia e tra tensione e velocità è lineare. Dato che quasi l’intero diametro del motore può essere usato per l’avvolgimento, i motori raggiungono, tenuto conto del loro peso e delle loro dimensioni, prestazioni e coppie migliori rispetto ai design convenzionali. Contemporaneamente, la bassa inerzia del rotore garantisce una costante temporale elettrica estremamente bassa. Questo consente di utilizzare i motori in modo molto dinamico e in forte sovraccarico. Nelle applicazioni servo motorizzate, una coppia continua di tre volte superiore in condizioni di sovraccarico non è rara e nemmeno impossibile, a condizione che la temperatura per l’avvolgimento del motore sia monitorata. Ma i motori con un diametro di 22 mm o di dimensioni ancora inferiori non hanno un sensore di temperatura integrato. Semplicemente non c’è abbastanza spazio. Se si collega al microazionamento un controllore qualsiasi, la bobina potrebbe addirittura fondersi ancor prima che il calore sia avvertito all’esterno.

Problemi come questo possono essere evitati grazie ai controlli di posizione di FAULHABER, che sono stati sviluppati per soddisfare i requisiti dei miniazionamenti e microazionamenti e sono stati testati in condizioni operative reali. Essi «stimano» la temperatura dell’avvolgimento per il rispettivo tipo di motore impiegando modelli di varia complessità. Questo permette di sfruttare l’intero range dinamico, ad esempio per i processi di posizionamento rapidi. Inoltre, la corrente viene limitata prima che l’avvolgimento si possa surriscaldare. I parametri richiesti possono essere comodamente trasmessi al regolatore di azionamento mediante la finestra di selezione del motore del FAULHABER Motion Manager.
Le informazioni supplementari sul collegamento termico nell’applicazione possono essere usate nei modelli contenuti nei controllori per continuare a migliorarli. Il motore viene ben raffreddato? È necessario limitare le prestazioni per via delle elevate temperature ambiente? Sono presenti un riduttore e un encoder? In presenza di informazioni aggiuntive di questo tipo è possibile impiegare la potenza massima del motore, ad es. con un azionamento che funziona in modalità ciclica all’interno di una camera climatica, grazie al controllo di posizione che aggiorna nei modelli presenti i parametri per la temperatura ambiente dal controllo della camera climatica. Lo stesso vale per il caso in cui i cicli di carico sono noti. Spesso questo permette di scegliere un motore più piccolo durante la progettazione, traducendosi in un vantaggio soprattutto per l’impiego negli apparecchi mobili.
Per via della bassa costante temporale elettrica, vantaggiosa per i processi dinamici, si possono verificare ulteriori perdite dovute alla modulazione di larghezza di impulso (PWM), comune nei regolatori di azionamento. Le costanti temporali elettriche tipiche dei motori ad armatura a campana di FAULHABER sono di circa 10 µs. Per le frequenze PWM inferiori a 50 kHz, in molti casi la coppia continua specificata nella scheda tecnica non può più essere raggiunta, oppure il motore potrebbe surriscaldarsi. Proprio per questo, durante la scelta del controllo di posizione è importante accertarsi che la frequenza PWM sia sufficientemente alta. Per i controlli di posizione di FAULHABER quest’ultima è di circa 78–100 kHz, a seconda del tipo. Grazie al tipo di modulazione si hanno fino a 200 kHz che agiscono sul motore, soddisfacendo così i requisiti dei piccoli motori.
Potenti ed estremamente miniaturizzati
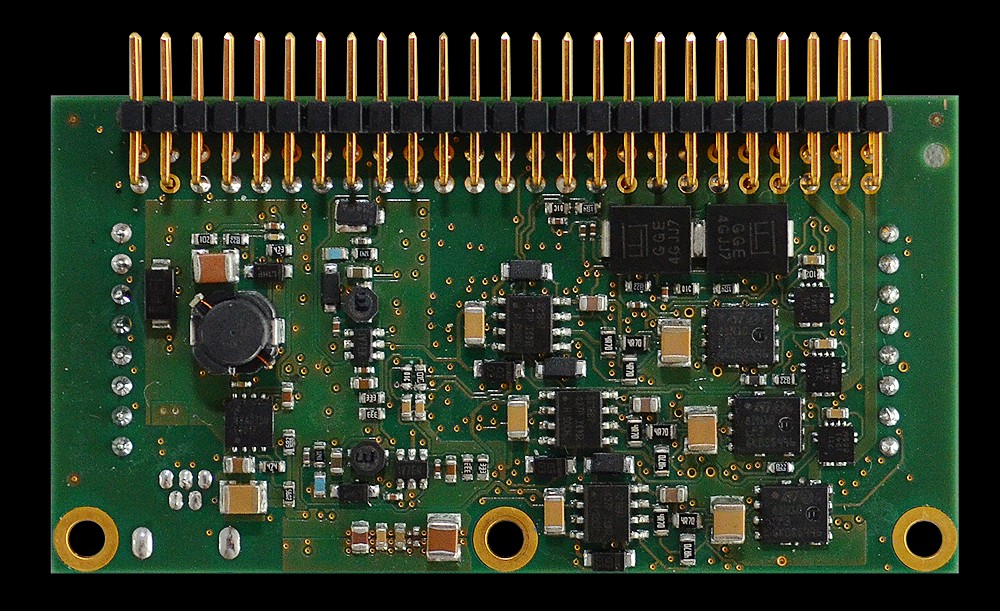
I controlli di posizione della famiglia MC V3.0 sono collaudati da anni, tuttavia, a causa delle loro dimensioni e della risoluzione della misura di corrente del motore integrata, spesso non sono adatti per i micromotori di FAULHABER. È qui che entra in gioco il nuovo MC 3001 B/P: Si tratta del primo controllo di posizione perfettamente idoneo per i servoazionamenti più piccoli, sia in termini di dimensioni che di risoluzione della misura di corrente. Con una tensione di alimentazione massima pari a 30 V, il controllo di posizione che misura 16 x 27 x 2,6 mm (P x L x H) raggiunge una corrente continua di 1 A e una corrente di picco di 5 A. Per tensioni di alimentazione inferiori, come ad es. nei sistemi a 12 V, è possibile raggiungere senza problemi anche correnti continue fino a 2 A. Al contempo, non presentano rinunce di funzionamento rispetto ai prodotti più grandi della stessa famiglia. Le opzioni I/O e l’interfaccia encoder sono le stesse di quelle degli altri prodotti della stessa famiglia. Le interfacce di comunicazione disponibili sono USB, RS232 e CANopen. Tramite una scheda di supporto specifica per il cliente (scheda madre), è possibile fornire anche una compatta interfaccia EtherCAT.

I controllori sono disponibili in due varianti: il modello con connettori scheda-scheda piatti (MC 3001 B) è l’ideale quando su un’unica scheda di supporto vengono combinati più controllori di azionamento. La variante MC 3001 P presenta un connettore a spina con passo di 2,54 mm su tre lati. È facile da integrare nella propria configurazione, ad es. per applicazioni multiasse nell’automazione di laboratorio. Dunque, adesso sono finalmente disponibili potenti controlli di posizione anche per i più piccoli azionamenti DC di FAULHABER, perfettamente idonei per i motori sia in quanto a dimensioni che al funzionamento.



{kind=link}