

Trasduttori e attuatori sono sempre più diffusi, le loro dimensioni continuano a ridursi mentre le prestazioni aumentano.
I trasduttori sono una importante categoria di dispositivi che consentono di interfacciare il mondo fisico alle macchine con una modalità simile a quella che l’essere umano utilizza per interagire con il mondo fisico che lo circonda. Da qui l’ispirazione di emulare la modalità di interazione dell’uomo con il mondo fisico tramite i trasduttori naturali: sensi e organi motori, a cui ha fatto riferimento la robotica per sviluppare il modello computazionale noto come ROBOT.
I trasduttori si suddividono in due categorie fondamentali in funzione della direzione di azione: dal mondo esterno verso la macchina (sensori) e dalla macchina verso il mondo esterno (attuatori). I sensori, dal punto di vista tecnologico, hanno avuto maggiore attenzione e sviluppo in quanto consentono di raccogliere informazioni dal mondo fisico per abilitare le macchine all’interpretazione del mondo fisico e di misurarlo. Inoltre, i sensori hanno subito dimostrato di essere facilmente realizzabili con le tecnologie elettriche ed elettroniche, là dove erano riferibili a leggi della fisica dei materiali. Il recente sviluppo della tecnologia MEMS (Micro Electro Mechanical System) ha consentito di realizzare sensori in dimensioni microelettroniche tali da farne esplodere l’utilizzo in settori a elevati volumi di produzione, per esempio i prodotti consumer.
Lo sviluppo della robotica e dei sistemi di controllo automatici hanno successivamente spostato l’attenzione degli sviluppatori sull’altra componente dei trasduttori, gli attuatori. L’esigenza applicativa non si limitava al solo sensing dell’ambiente fisico, ma anche alla sua modifica in funzione del modello di controllo che si voleva implementare. Nella robotica in particolare c’era l’esigenza di agire sul mondo esterno alla macchina per azionare, per spostare, per modificare il mondo fisico esterno verso la macchina per consentirle di eseguire i compiti a cui era delegata.
L’attuatore è un meccanismo attraverso cui un sistema “intelligente” (agente) agisce sull’ambiente fisico con cui interagisce (incluso l’essere umano o, più in generale, l’essere biologico). Essendo l’attuatore un trasduttore, il funzionamento è basato su principi della fisica che descrivono proprietà dei materiali che trasformano una forma di energia in una differente forma di energia.
I trasduttori, essendo parte fondamentale dei sistemi di controllo elettronici, sono sistemi di trasformazione di segnali fisici qualsiasi in segnali elettrici (sensori) e di segnali elettrici in segnali fisici qualsiasi (attuatori). L’attuatore più ampiamente diffuso nei sistemi di controllo automatico è il motore elettrico. Il motore elettrico è un attuatore elettro-meccanico che consente di trasformare un comando (segnale) elettrico in uno spostamento fisico (movimento). Il motore elettrico, viene utilizzato per ottenere prevalentemente il movimento circolare, ma anche lineare in funzione della proprietà fisica su cui è basata la sua implementazione.
Gli attuatori, in base alla tecnologia costruttiva possono essere di varia natura:
• elettrici: i relè;
• elettromagnetici: basati sul principio della fisica noto come “forza di Lorentz”, i motori, le valvole, i pistoni, ecc.;
• elettrostatici: basati sul principio della “forza di Coulomb” dell’attrazione tra cariche elettriche di segno opposto, relè, valvole, solenoidi;
• piezoelettrici: basati sulla proprietà di materiali che sottoposti a deformazione producono una differenza
di potenziale elettrico che è funzione della deformazione (sensore) e viceversa
e che si deformano se sottoposti a una differenza di potenziale elettrico
(attuatore);
• ottici: basati sulla proprietà fisica degli elettroni di trasformazione in fotoni (LED, display, lampade);
• MEMS: realizzati in tecnologia microelettromeccanica, motori, vibratori, pompe, ecc.
I microattuatori
I microattuatori sono attuatori realizzati con tecnologie microelettroniche (prevalentemente MEMS) per essere utilizzati in sistemi microelettronici di natura embedded (per esempio negli smartphone: altoparlanti, vibratori, display, LED).
La miniaturizzazione dei sistemi elettronici come il telefono o dei dispositivi sanitari (pacemaker, protesi acustiche, ecc.) hanno spinto alla miniaturizzazione degli attuatori, fino a poco tempo fa ancora poco utilizzati nell’elettronica. Lo sviluppo in grandi volumi dei droni, per esempio, ha spinto alla realizzazione di micromotori di dimensioni compatibili con le dimensioni di droni che imitano esseri biologici come gli insetti, e i volatili in generale. I microattuatori acustici (altoparlanti), per esempio, hanno dovuto raggiungere dimensioni tanto piccole da essere compatibili con le dimensioni delle protesi acustiche per gli ipoacusici (dimensioni compatibili con quelle del canale uditivo). Più in generale, i microattuatori sono attuatori compatibili con la natura microelettronica dei sistemi embedded e ultraembedded.
Microattuatori audio
Gli attuatori audio in generale sono trasduttori elettro-acustici, cioè trasformano un segnale elettrico in un segnale acustico corrispondente. L’altoparlante implementa il principio fisico della Forza di Lorentz per produrre onde acustiche (compressione e rarefazione dell’aria) per riprodurre suoni da segnali elettrici corrispondenti. Nella realizzazione elettromeccanica dell’altoparlante le dimensioni e la componentistica necessaria (magneti, bobine, coni, ecc.) hanno dimensioni e natura non compatibile con quella dei sistemi microelettronici e non sono integrabili con questi. Gli altoparlanti in versione microattuatore sono basati principalmente sulla tecnologia MEMS (MEMS loudspeaker); quindi, come è accaduto per i microfoni MEMS, anche per gli altoparlanti MEMS le parti meccaniche e quelle elettriche sono state realizzate in modalità ultra miniaturizzata su circuito integrato e con package wafer-scale.
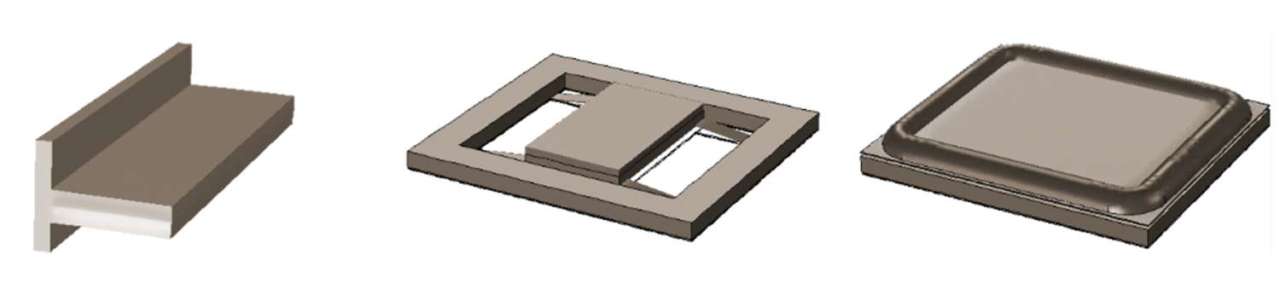
USound realizza microspeaker basati principalmente sulla tecnologia piezoelettrica, cioè cristalli caratterizzati da caratteristiche fisiche come PTZ (piombo-zirconato di titanio) quando agli elettrodi viene applicato un campo elettrico. Una serie di parti mobili (Fig. 1) realizzano l’equivalente delle parti mobili di un altoparlante convenzionale. Una membrana connessa alla parte finale di questa catena di parti mobili completa il circuito acustico per la produzione di suoni.

I microspeaker Ganymed di Usound sono microattuatori audio MEMS di dimensioni ultracompatte (4,7 × 6,7 × 1,6 mm), che consentono applicazioni ove le dimensioni sono un fattore abilitante (wearables). Questi microattuatori audio, malgrado le ridottissime dimensioni, consentono di ottenere una riproduzione audio di elevata qualità e a larga banda.
Microattuatori meccanici
Gli attuatori che maggiormente hanno avuto un ruolo abilitante nelle applicazioni elettroniche sono i motori elettrici. Basta pensare allo sviluppo della robotica e dei sistemi di controllo automatici. È ovvio che lo sviluppo della microelettronica abbia indotto allo sviluppo dei micromotori così come era accaduto per i microsensori. La tecnologia MEMS è stata la tecnologia abilitante per i microsensori e altrettanto sarebbe stata per i microattuatori in generale. I micromotori in questo scenario di innovazione tecnologica rappresentavano la sfida più impegnativa data la natura funzionale di tale dispositivo attuatore: parti meccaniche in movimento e parti meccaniche per l’interfacciamento diretto verso il mondo fisico esterno.
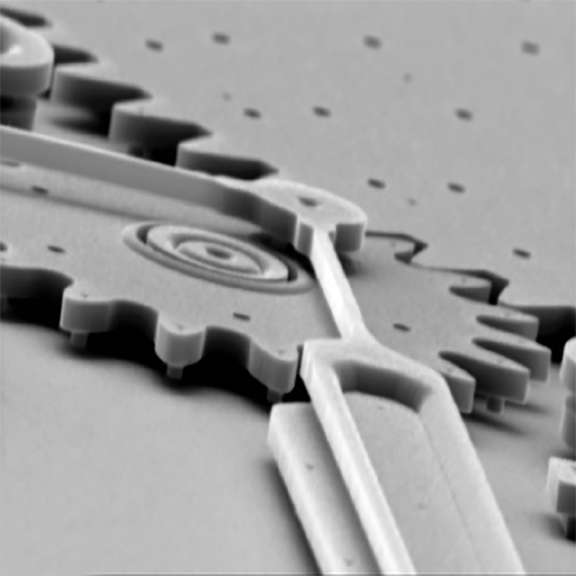
I Sandia National Laboratories, già molto avanzati nello sviluppo della tecnologia MEMS in varie direzioni applicative, hanno rivolto la loro attenzione anche alla implementazione in tecnologia MEMS degli attuatori e in particolare dei motori, pervenendo in tal modo alla realizzazione di micromotori MEMS. La parte più complessa nella realizzazione e applicazione dei micromotori MEMS consisteva nella realizzazione del meccanismo di accoppiamento con i sistema azionato. I micromotori MEMS realizzano tutte le parti meccaniche in movimento (ingranaggi, rotori, ecc.) con materiali del substrato microelettronico (silicio) e con le stesse caratteristiche riportano all’esterno del dispositivo il risultato dell’attuazione, l’azionamento, tramite assi e ingranaggi per l’accoppiamento con la meccanica dei dispositivi da azionare. Altri dispositivi di attuazione meccanica, come valvole, interruttori, pompe, ecc. sono state sviluppate in tecnologia MEMS sfruttando varie proprietà fisiche dei materiali, prima fra tutte la proprietà piezoelettrica.
Microattuatori ottici
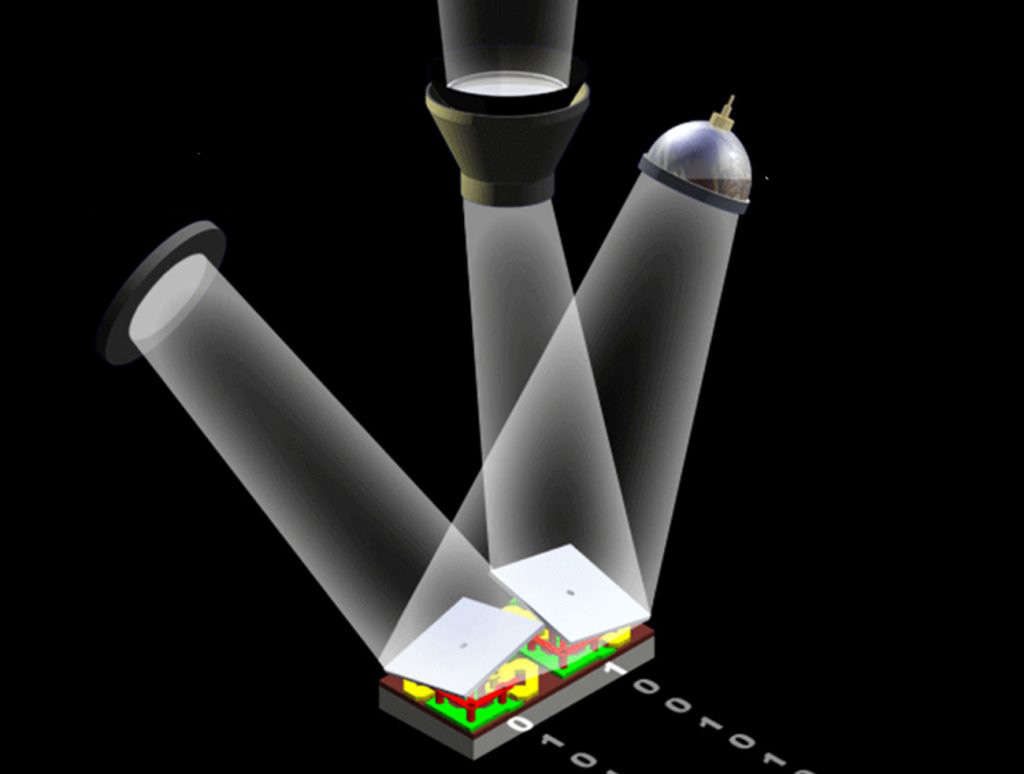
Un caso emblematico di microattuatore sono i Digital Micromirror Devices (DMD). I DMD sono microattuatori ottici in tecnologia MEMS che consistono di array di microspecchi in alluminio altamente riflessivi e orientabili, quindi dotati di micromotori che consentono un movimento angolare entro ±12 gradi. Implementati da Texas Instruments sotto forma di chip nella famiglia di prodotti DLP, sono utilizzabili in applicazioni industriali, mediche e di visualizzazion (Display). Ogni microspecchio rappresenta un pixel come elemento opto-meccanico che consente la realizzazione complessiva di un modulatore spaziale di luce basato sul controllo digitale.



{kind=link}